What we did in Sprint 1:
- Decided on this project
- Spun up team:
- Set up team communication channels
- Set up software and mechanical design toolchains
- Decided on design practices
- Discussed expectations, roles, and team dynamics
- Made a proof of concept using DC motors and hot glued string
- Calculated the change-of-basis math
- Upgraded the proof of concept with 3D printed parts
Current Status:
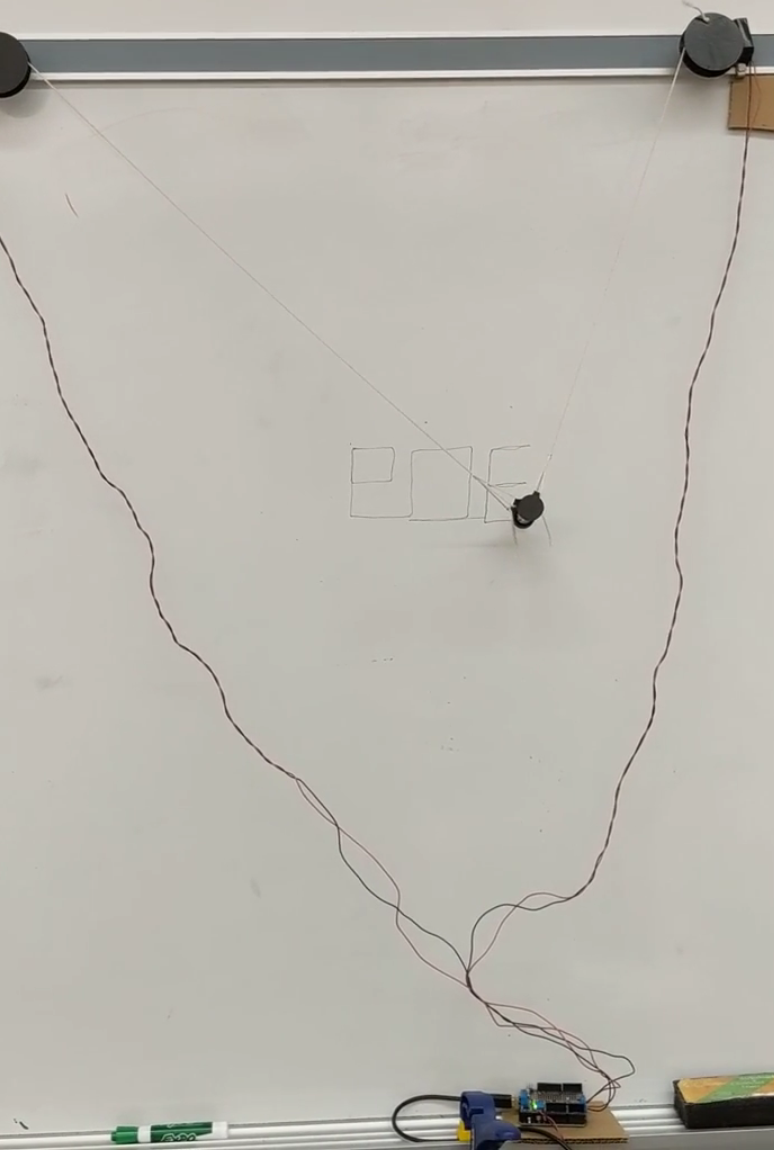
The sprint 1 system. Draws hardcoded points using dc motors and timing

A close up of the marker with 3D printed collets

What we learned:
- Proof of concept works
- DC motors are not precise enough
Risks:
- Ink is too light, need more pressure on pen
- Need to design a tool changer (draw/erase/move)
- Uncertain about precision of positioning
- SVG Computer Vision processing
- We have a working manual toolchain, automation would be nice
- Stepper motors
- Speed and torque uncertain
Future Considerations:
- Possibly build a CNC gantry
- High precision at the loss of simplicity
- No sway on the pen
- Tool changer
- Servo with many tools on its end
- + Compact
- - Not versatile (limited number of tools)
- Solenoids
- + More extendable with number of tools
- - Too much force? (Breaking pen tips, bouncing off the wall)
- - High current (cannot make wireless/battery powered)
- Servo with many tools on its end
Next Sprint Deliverables:
- Implement stepper motors
- Have a better cable/string system
- Tool changer (end effector) with pen/erase/move
- Draw vector graphics from a computer